-
前馈形式的振荡控制器(上)
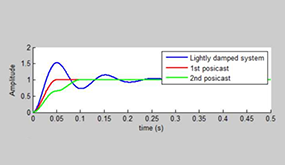
作者以上下篇的方式给我们介绍前馈形式的震荡控制器,以减小震荡、稳定系统。上篇主要介绍一种经典的前馈控制器--Posicast Controller。
7年前 · 李崇 · 知乎694
-
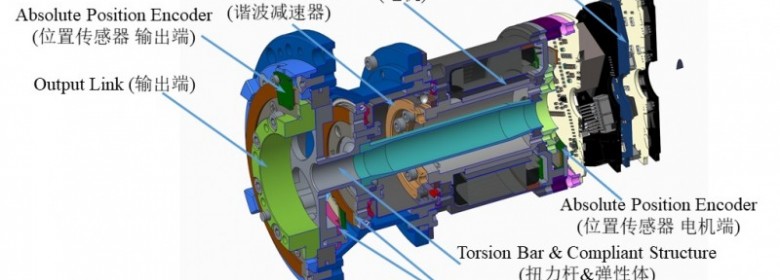
电流环与关节力矩传感器感知能力比较
作者通过理论解释、实验验证的方式来比较电流环与力矩传感器在感知外力上的区别,分析得出“力矩传感器在感知外力上优势明显”。
7年前 · 桂凯 · 知乎1101
-
交流伺服系统前馈控制策略
前馈控制策略实际上预测控制的一种,它与PID控制器相结合,相对于传统PID控制能够加快系统动态响应并降低系统误差,本文对此做了详细的讲解和对比。
7年前 · 丁有爽 · 知乎1083
-
机械加工工艺师——机床应用篇
作者围绕机械加工行业最通用的车、铣、刨、磨、镗、钻、线切割等加工设备分次展开讨论机床的应用,并针对这些加工设备的类型、适用范围、结构特点和加工精度做进一步详细阐述。
7年前 · 蒋小坏 · 知乎725
-
外骨骼机器人入门学习小结
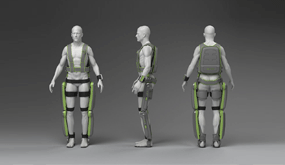
本文主要介绍外骨骼机器人、外骨骼机器人控制方法,重点讲解几款外骨骼机器人典型的技术方案,并总结外骨骼机器人的现状和技术/商业难点,而且作者还分享了顶尖外骨骼公司网站的链接和丰富的视频链接等你来看哈
7年前 · 师云雷 · 知乎4834
-
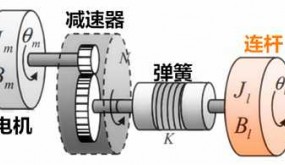
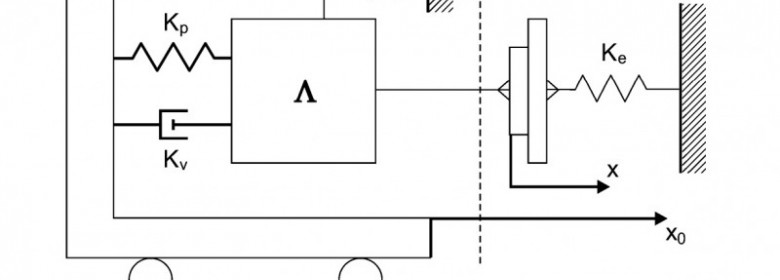
经典SEA线性动力学模型及其简化与力矩求导
本文一步一步讲解线性动力学模型的建立、模型的简化以及力矩求导公式的推导,让之前没有了解过SEA的你,快速入门。
7年前 · 任赜宇 · 知乎1800
-
浅谈阻抗
阻抗控制是工业界设备(包括机器人)的关注的一个重要指标,作者从专业角度理解,阻抗控制背后的思路调整系统的表征惯量、阻尼、和刚度,并分别举例详加说明。
7年前 · 师云雷 · 知乎1905
-
尝试揭开Atlas后空翻的面纱-其背后的技术浅析

看大神如何解析“Atlas的经典动作-后空翻”的技术。
7年前 · 段晋军 · 知乎1315
-
机械设计(课程)——丝杆传动系统结构设计
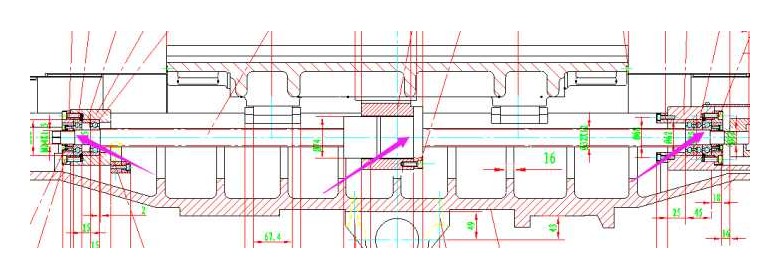
本文主要讲解丝杆在传动系统中的结构,并结合图片,形象直观的逐一介绍了组成丝杆的16个零件及其作用。
7年前 · 蒋小坏 · 知乎2108
-
机器人控制该怎么入门?
从机器人控制硬件、软件算法以及运动控制理论三个方面分析机器人控制该如何入门。
7年前 · 贺磊 · 知乎2446