-
怎样用ROS打造机器人建图导航

作者用PPT+文字描述的方式,和大家聊一聊用ROS进行移动机器人建图导航的一些事情,和现场一样精彩哦
7年前 · 田博 · 知乎1231
-
一探究竟:特斯拉Model 3 电池系统

本文是一篇关于特斯拉Model 3 电池系统的拆解文章,及作者对Model 3技术的独特的理解和判断。
7年前 · 哩小熊 · 知乎1221
-
如何理解工业机器人的工具中心点(TCP)?
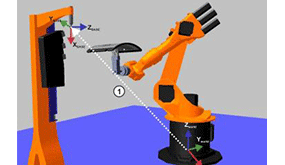
本文主要讲述工具中心点的定义、类型及重要意义。
7年前 · 北岛李工 · 知乎1789
-
有哪些应用于移动机器人路径规划的算法

作者通过自己的研究和实践,将规划算法分为完备的和基于采样的2大类,并详加讲解。
7年前 · 小队长的零 · 知乎883
-
SLAM简介

本文主要介绍移动机器人领域中广泛应用的技术SLAM(同步定位与地图绘制)的理论基础以及应用细节。
7年前 · 丁有爽 · 知乎909
-
深度相机哪家强?

本文介绍了深度相机,以及基于特征匹配和基于反射时间的深度测量原理。
7年前 · 丁有爽 · 知乎1284
-
机器人抓取(2)

本文主要讲述什么是机器人抓取,机器人抓取的重要性及其技术难点。
7年前 · 李淼 · 知乎897
-
机器人抓取(1)

作者客观阐述了目前几种机器人抓取的研究方向、及其技术难点和状态。
7年前 · 李淼 · 知乎968
-
一种带力矩、位置传感器的紧凑人型机器人SEA驱动器(带谐波减速器)机械设计方案

本文介绍一种带力矩、位置传感器的紧凑人型机器人SEA驱动器(带谐波减速器)机械设计方案,是任赜宇博士所在研究所(Istituto Italiano Di Technologia)研究的技术成果。
7年前 · 任赜宇 · 知乎1832
-
前馈形式的振荡控制器(下)
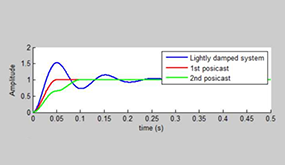
作者以上下篇的方式给我们介绍前馈形式的震荡控制器,以减小震荡、稳定系统。下篇主要讲解解决posicast不足之处的方法--级联posicast。
7年前 · 李崇 · 知乎705