-
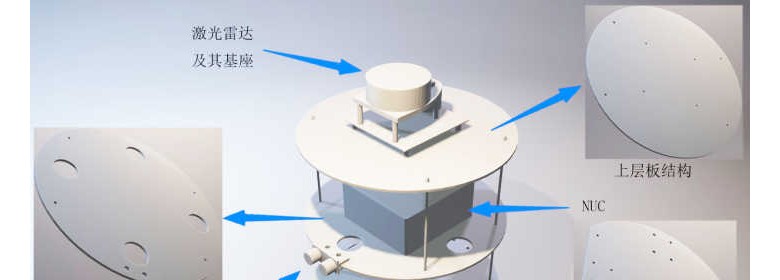
基于ROS的自主导航小车Plantbot—SLAM
步教你如何制作基于ROS的自主导航小车Plantbot,请再看SLAM部分。
7年前 · 卓求 · 知乎1429
-
基于ROS的自主导航小车Plantbot--底层驱动
三步教你如何制作基于ROS的自主导航小车Plantbot,请先看底层驱动部分。
7年前 · 卓求 · 知乎1345
-
MIT成功研发库管用途RFID中继无人机

本文主要介绍RFID的基础知识和MIT成功研发的库管用途RFID中继无人机技术分析。
7年前 · Alex 北大荣令金 · 知乎872
-
KUKA LBR iiwa机械手是如何实现精密力控制的

作者先从讲解基础知识讲起,然后3块分析KUKA LBR iiwa机械手是如何实现精密力控制的。
7年前 · 邱强 · 知乎3214
-
机器人运动学与动力学在控制上的区别与联系?

本文从非集中控制和集中控制来分析运动学与动力学的区别与联系。
7年前 · 老马走好 · 知乎1176
-
基于末端六维力传感器的拖动示教是如何完成的?

本文汇集了多位大拿的关于“基于末端6维力传感器的拖动示教是如何完成的”的详细回答。
7年前 · 慕兄 · 知乎1043
-
论人工智能与机器人企业的生死根源

周总从行业高度谈论人工智能和机器人企业的生存之道,并从这个专业角度阐述了睿慕课存在的意义。
7年前 · 周朔鹏929
-
无人车为什么一定要用激光雷达做,双目视觉难道不行吗?

作者认为双目视觉是未来发展的方向,相比激光雷达会有很多优势。
7年前 · gashero · 知乎1032
-
怎么把Proe画出来的3D模型转换成URDF文件格式?

作者分初级篇和进阶篇/强迫症篇 2个阶段,逐步讲怎么把Proe画出来的3D模型转换成URDF文件格式。
7年前 · 邱强 · 知乎2150
-
如何通过系统辨识获得伺服系统精确模型,在此基础上设计满足性能的控制器?

作者从系统辨识和控制器设计2方面回答。
7年前 · 桂凯 · 知乎979