-
深度理解PLC的停机模式(What STOP means?)

PLC至少有三种工作模式:StartUp、RUN和STOP,S7-300/400PLC还有第四种模式:Hold,本文深入讨论下PLC的停机(STOP)模式。
7年前 · 北岛李工 · 知乎1332
-
深度理解PLC的工作原理(How PLC works)

本篇文章中作者深入讨论了PLC的工作原理并回答了循环扫描及PLC程序结构等重要问题。
7年前 · 北岛李工 · 知乎980
-
亚马逊智能仓储机器人为什么选择移动货架而不是让一些移动操作臂区进行货物挑选?

两位分享者分别从机器人抓取技术、AGV+机械臂的成本以及生产效率等方面回答为什么选择让货架移动而不是AGV+机械臂去抓取。
7年前 · 慕兄 · 知乎1129
-
Spotmini最新Demo: Hey Buddy, Can You Give Me a Hand?
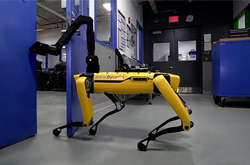
看波士顿动力机器人Spotmini如何"手脚并用"成功打开了弹簧防火门。
7年前 · 任赜宇 · 知乎1010
-
区块链应用的去中心化只是一个乌托邦

作者认为区块链应用的核心价值并不是去中心化,而是易于构建可被监督的价值流通体系。
7年前 · 陈浩 · 知乎749
-
(上篇)第18章 机器人辅助手术中的力反馈和感觉替代

本文主要从力反馈方法,环境端信息测量和估计方式,遥操作类型,遥操作控制性能评估以及设计的影响几个方面进行了综述,并提到和解释基本上遥操作理论的核心。
7年前 · 师云雷 · 知乎4588
-
人工智能与机器人技术发展方向与机会辨析

周总通过对传统工业机器人现状、新型智能机器人发展以及人工智能不断深入各细分领域趋势的分析,提出创造性的应用人工智能技术和机器人技术,提出解决方案并实现相应的产品,空间巨大,是创业创新的重点方向。
7年前 · 周朔鹏1895
-
机器人学习最前沿:一眼模仿学习(One-Shot Imitation Learning)的三级跳

最近One-Shot Imitation Learning把机器人学习推到更高的高度,作者对其进行详细介绍,详细分析其关键技术Meta Learning,并因此对未来人工智能充满希望。
7年前 · Flood Sung · 知乎1990
-
开篇:机械手设计挑战——仿人机器人设计领域上的高峰

本文主要从高自由度的灵巧性,高抓重比的鲁棒性,全覆盖性高灵敏度的传感性,传动的可靠与机构的环境顺从性以及机电系统的高度集成性等5个方面来谈谈传统机械手在设计上的不足。
7年前 · 任赜宇 · 知乎5171
-
混动系统控制策略解析----Overview

本文陈述的是混合策略宏观概念,以插电式混动为主来讲解。
7年前 · 屌丝小蚂蚁 · 知乎838