

 黄金会员免费
黄金会员免费课程通过筛选众多领域内最新技术,总结精炼实用有效的四旋翼规划与控制方法;介绍最具潜力与未来发展前景的基于视觉的四旋翼定位与控制。这些相关知识,还可以灵活的扩展到单旋翼、多旋翼、垂直起降无人器以及水下无人器等多种欠驱动机器人上,能够有助于解决实际工程问题、发明改进相关算法、提升自动化性能。
讲师提示

郭德骏
优必选北美研发中心高级工程师 美国犹他大学博士
- 讲师简介
- 优必选北美研发中心高级工程师,美国犹他大学博士。主要研究方向包括视觉伺服、控制算法、路径规划、无人车自主导航、无人机、机械臂。获得2017 ASME DSCC最佳学生论文奖。在国际刊物和会议发表SCI引索论文10余篇。
- 课程须知
- 1. 建议具有一定的线性代数,微积分,机器人基础
2. 适合有机器人基础的人群
3. 适合对四旋翼无人机非常感兴趣的人群
4. 请添加助教微信进”班级群”(微信号:H13817559067)
- 课程目标
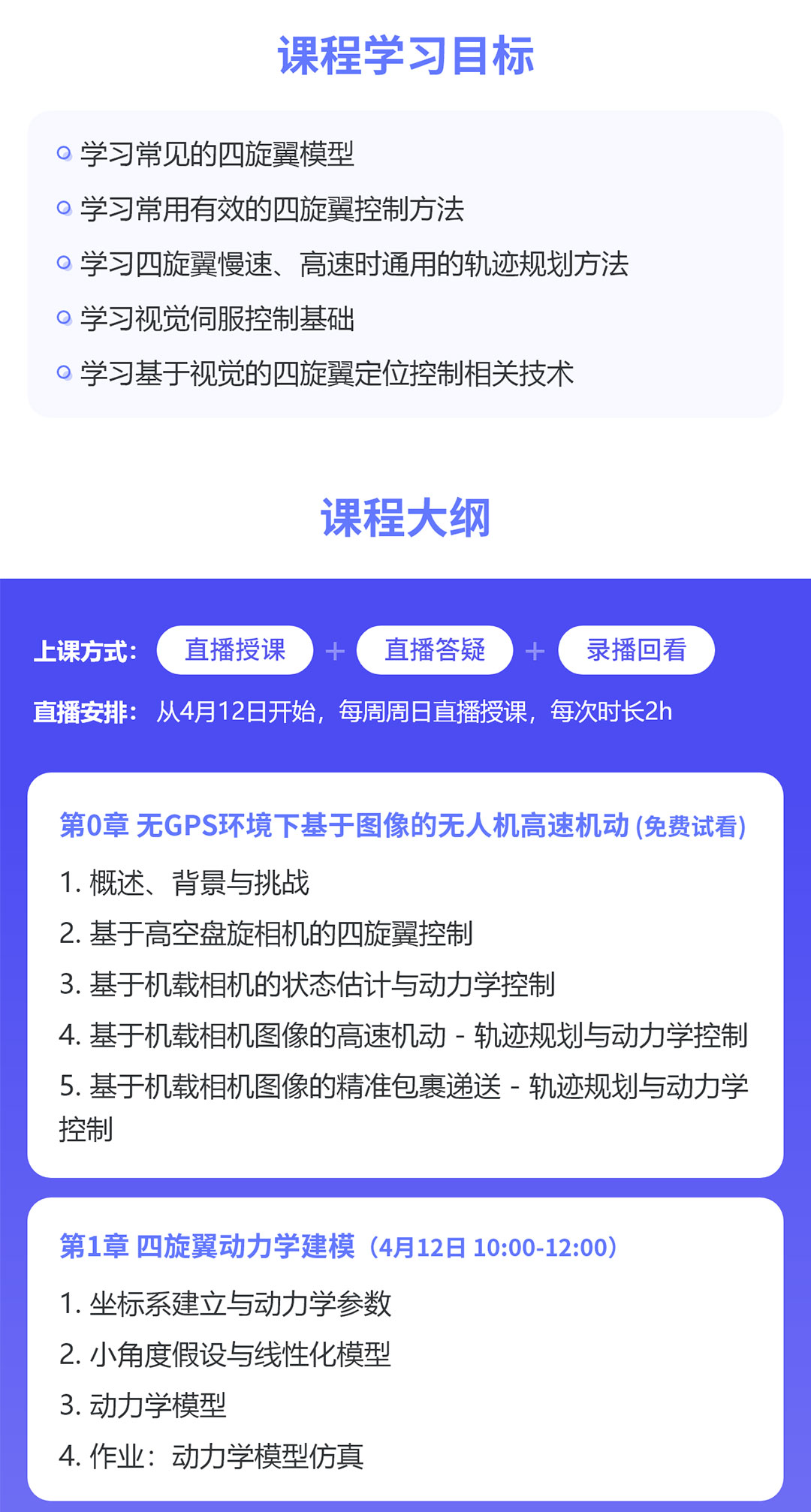
- 1. 学习常见的四旋翼模型
2. 学习常用有效的四旋翼控制方法
3. 学习四旋翼慢速、高速时通用的轨迹规划方法
4. 学习视觉伺服控制基础
5. 学习基于视觉的四旋翼定位控制相关技术






