

-
学习人数
9472
-
难度级别
中级
-
课程时长
22时32分
-
综合评分
10
购买课程
¥ 999.00
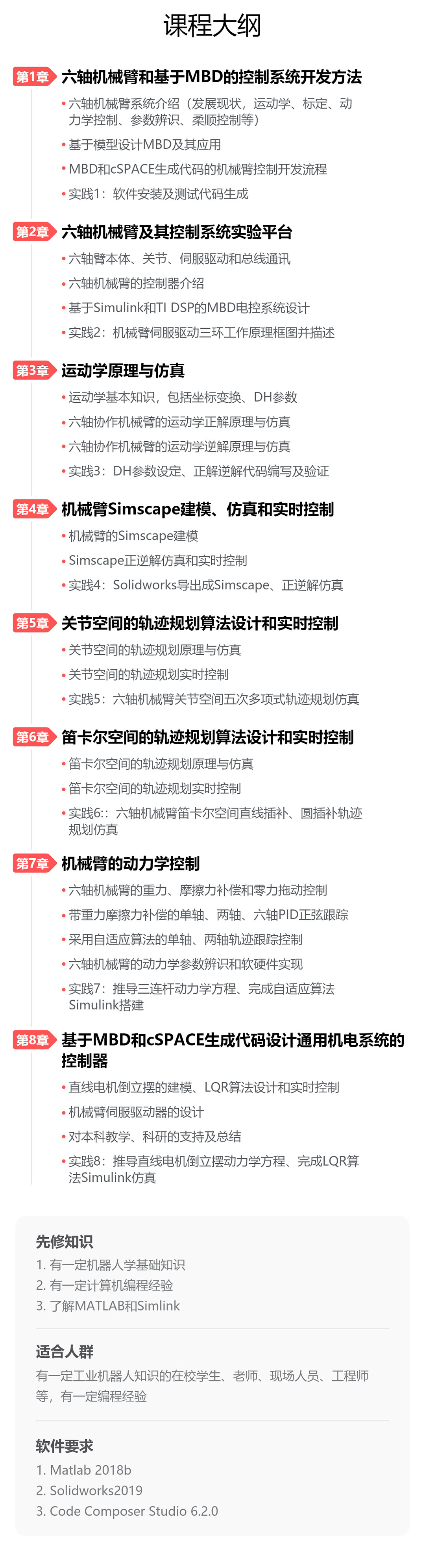
本课程采用基于模型设计(MBD)的工程开发方法,实现对六轴机械臂系统的开发,包括六轴机械臂的知识和控制器的软硬件实现,有助于设计串联、并联的机械臂、康复医疗机器人等其它机电设备的电控系统。目前,这种世界先进的开发方法,国际上一流企业都在用,如Airbus、Boston Dynamics、特斯拉、三星、马自达、宝马、奔驰等。掌握了这种方法,就掌握了国际先进技术,让你轻松成为“高薪”一族。



讲师提示

甄圣超
佐治亚理工学院博士、合肥工业大学副教授
- 讲师简介
- 佐治亚理工学院联合培养博士,合肥工业大学机械工程学院副教授,中科深谷首席专家,主要从事六轴机械臂,MBD工程方法,系统动力学与先进控制理论等方面的研究,SCI收录论文10多篇,中科深谷首席专家,主讲机械臂运动学、动力学、参数辨识、基于MBD的机械臂控制系统设计。
- 课程须知
- 软件版本为Matlab 2018b、Solidworks2019、Code Composer Studio 9.0.1
除了甄圣超老师以外还有张延亮老师、许雄老师和陈现敏老师
资料下载
-
 【MBD】课件37.047M 269次下载
【MBD】课件37.047M 269次下载 -
【MBD】参考资料266.915M 252次下载
-
【MBD】作业244.549M 186次下载
-
【MBD】软件须知1012.49K 185次下载
-
【MBD期末】优秀作业132.113M 184次下载






