-
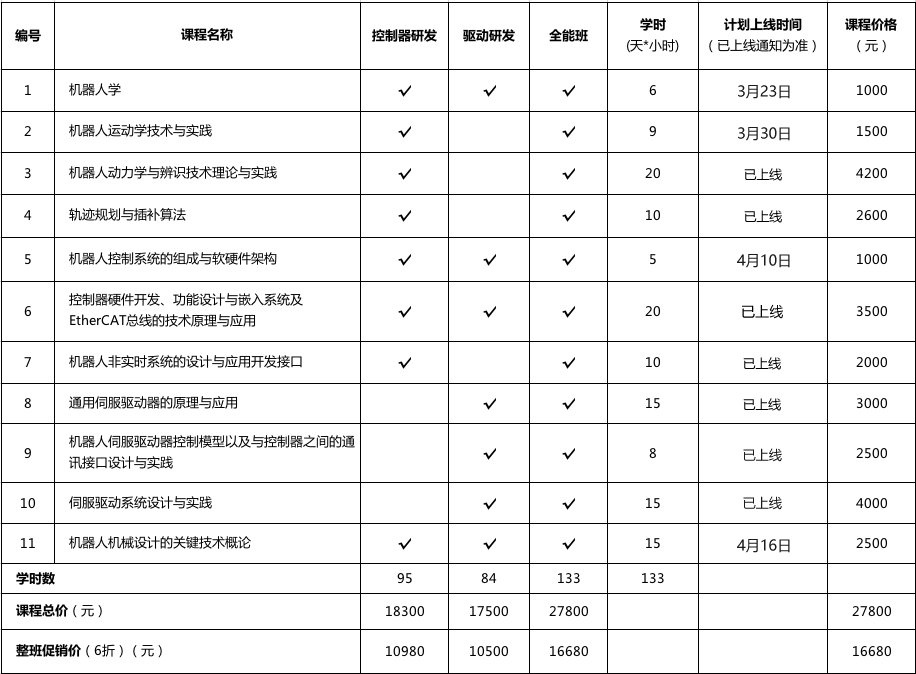
录播一、机器人学
回顾机器人学的基础理论,为学员后续的知识学习打下坚实的基础。
钱晋武
上海大学二级教授。"机械电子工程"(国家重点学科)"先进机器人与精密工程"学术方向带头人。2000年入选国家人事部百千万工程(第一、二层次)。现任上海市机器人学会理事长、中国仪器仪表学会精密机械分会常务理事、IFToMM (国际机器理论和机构学会)中国委员会委员等。期刊Advances in Manufacturing(执行)副主编,《光学 精密工程》、《自然杂志》等编委。
课程时长 · 6学时 计划上线时间 · 3月16日
-
录播二、机器人运动学技术与实践
对机器人运动学的原理与实践进行阐释,并根据工程实践以及开发过程中遇到的种种问题进行讲析,给出切实可行的控制方法。
赵龙海
上海交大机动学院博士,主要从事机构学与机器人学的基础理论研究,具体内容包括:可展开机构、可重构机构、高速操作并联机构、柔顺机构与软体机器人等;机电一体化装备方面的应用研究。擅长领域:机构学:可展机构、可重构机构、自重构机器人、软体机器人;机器人学:基于指数积的运动学、动力学,阻抗控制、力位混合控制。
课程时长 · 9学时 计划上线时间 · 3月23日
-
三、机器人动力学与辨识技术理论与实践
在运动学的基础上,结合动力学和相关辨识技术,对动力学算法和技术在机器人上的综合应用进行讲析。完成整个结合了运动学和动力学的综合的机器人控制算法。并结合开发实践,对实际开发中遇到的各种问题进行分析,给出解决方案。达到将完整的理论和方法用于实践,即可实现机器人的开发的目的。
潘阳 机器人动力学与运动学精讲
上海交通大学博士后,研究方向:并联机器人、特种机器人、腿式机器人,研究具体内容:并联机器人机构设计、实时控制器、EtherCat总线控制、机器人动力学、机器人轨迹/步态规划等,擅长领域:机器人实时控制器、螺旋理论、机器人动力学、并联机构设计、特种/腿式机器人轨迹规划等。
课程时长 · 10学时 进入学习
桂凯 柔性关节机器人动力学、参数辨识与控制
上海交通大学机器人研究所博士,研究方向包括机器人动力学与控制,柔顺控制,机器外骨骼及生机电一体化,专注于将动力学理论付诸于实践,有着丰富的仿真与实践经验。
课程时长 · 10学时 进入学习
-
四、轨迹规划与插补算法
轨迹规划和插补算法是相对传统的数控技术的一部分,但是,针对机器人的研发,已经产生了大量新的算法和解决方案,本课程着重从实践的角度,解决相关问题。
郎言书
中科院沈阳计算技术研究所博士生,研究方向为数控系统运动控制技术。
所属机构为中科院高档数控国家工程研究中心,拥有“蓝天数控”系列化产品,具备完善的研发和实验平台,拥有100余项国家专利,获第十三届、十五届中国发明专利优秀奖。课程时长 · 10学时 进入学习
-
录播五、机器人控制系统的组成与软硬件架构
从整个机器人控制系统的角度,对包括示教器、控制器、伺服驱动器、电机等构成的控制系统进行分析,明确每个控制单元在整个控制系统中所起到的作用和他们之间的功能接口和关系。
周朔鹏
上海珍为科技有限公司董事长。历任上海新时达机器人有限公司副总经理、上海新时达机器人有限公司研发中心总监、上海新时达电气股份有限公司技术中心研发副总监,上海高威科电气技术有限公司副总工程师,中国南车集团戚墅堰机车车辆厂自动化工程师。
长期从事自动化系统开发。2007年开始从事工业机器人控制系统的开发工作。2011年创立上海新时达机器人研发团队,2014年创立上海新时达机器人有限公司。
完成“上海市高新技术转化项目——SR型机器人”1项、获得嘉定区科技进步二等奖1次;牵头申请或者参与申请专利16项;申请软件著作权8项;申请上海市科委、经委等研发和产业化项目7项,总计获得政府经费支持2000余万元。
上海市机器人学会理事、上海机器人产业创新联盟专家组成员、中国机器人产业联盟认证专家组专家、上海市机器人行业协会理事、中国机电一体化技术与应用协会职教分会理事、上海市科学技术专家库入库专家。课程时长 · 5学时 计划上线时间 · 4月03日
-
六、控制器硬件设计、开发、嵌入系统及EtherCAT总线的原理与应用
作为实时总线技术,EtherCAT已经成为众多机器人控制器和驱动器之间的标配。本课程对EtherCAT总线的原理和应用进行讲解,并针对EtherCAT总线在机器人上的应用,进行精确阐释。内容包括如何通过总线处理动力学前馈问题等。
徐凯 基于Linux的实时控制系统搭建实例与EtherCAT主站配置详解
山东大学机械电子工程硕士,在自动化行业以及机器人行业有9年从业经验,长期负责机器人控制器底层系统的开发与维护,以及机器人控制器外设驱动的开发与维护,同时负责运动控制器的核心运动控制运行时(CODESYS Runtime)的移植与二次开发,作为核心的开发人员,参与开发了至少三个型号的运动控制器,在工作中,积累的丰富的开发以及维护经验。
课程时长 · 10学时 进入学习
-
七、机器人控制软件非实时系统的组成与实现
作为一个机器人控制器,上述运动学、动力学、轨迹规划、插补算法等都属于实时系统的开发部分。作为一个机器人控制系统,还存在大量的非实时的服务和功能,比如,示教器以及与示教器的通讯、示教器语言的解释、存储器管理和内存管理、文件管理、网络通讯、工艺程序的编辑和输入、机器人的配置功能支持等。
本课程对机器人的非实时系统的构成和开发要点进行讲解。
非实时系统包括示教器系统。周军
计算机专业硕士,从事机器人嵌入式软件开发九年,熟悉windows和linux下编程。开发过几十个非标软件,多次担任软件负责人参与国家项目开发。
课程时长 · 10学时 进入学习
-
八、机器人通用伺服驱动器的原理与应用
众多机器人开发者对伺服驱动器的原理和应用的认识程度偏低。对于算法的研究多,对于如何驱动执行研究的少。
本课程着重于对通用的伺服驱动产品的原理和应用进行精讲,让机器人开发者了解伺服驱动器的功能和应用,为更好的开发机器人打好驱动期方面知识基础。杜佳星
杜佳星,华中科技大学硕士,现任武汉迈信电气技术有限公司研发总监、副总经理。从事伺服驱动器、伺服电机的研发工作11年。研究方向:伺服驱动器、伺服电机。研究具体内容:伺服驱动器软硬件设计,PowerLink、EtherCat、Profinet、Mechatrolink总线技术,现代控制理论等。
课程时长 · 6学时 进入学习
-
九、伺服驱动器中的控制理论基础与性能提升
机器人专用的伺服产品和通用的伺服产品是有区别的,通用的伺服产品往往只能通过位置给定,系统通过识别控制误差,并反馈放大误差信号实现位置跟随,这种控制方法的特点就是控制延时是必然产生的结果。在工业机器人的关节控制过程中,对于串联连杆机构,每个关节的控制延时和误差会被机构放大,造成末端TCP出现较大的控制误差。因此,工业机器人的控制过程中强调对动力学方法的运用,通过对机器人本体进行动力学建模,并结合辨识技术对不同环境条件下本体关节摩擦学影响和负载的变化进行补偿,达到对电机力输出进行精确预测的目的。
在此过程中,控制器的动力学算法和辨识算法需要实时的对驱动器的电流和电机力输出的特征进行测量,同时,需要将由动力学和辨识算法计算的结果前馈给伺服电流环,以实现对电机力输出的精确控制。同时,前馈的电流、速度等信息还需要和原有的伺服位置环、速度环、电流环的控制协调工作。
因此,需要对机器人专用的驱动器控制模型进行重新建模,并明确和控制器之间的数据通道的接口和量纲等。
这是这门课程需要解决的问题。孙佳将
华中科技大学博士,主要从事伺服驱动器的相关技术研究,研究方向为交流永磁同步电机的无速度控制、MTPA、参数辨识、自适应控制等,长期从事伺服驱动器嵌入式软件开发,自2012年起,一直在Zynq上进行驱控一体化系统的设计与研发。曾参与并完成一款伺服驱动器的软件研发,国内第一款永磁同步电机驱动的两轮车驱动系统研发并获得量产,以及一款独轮车的驱动系统研发。
课程时长 · 15学时 进入学习
-
十、高性能伺服驱动系统设计与实践
本课程提出机器人专用伺服的控制模型,并对其原理与实践进行分析和讲解。
——伺服驱动器硬件架构与功能开发
——伺服驱动器控制算法与实践
——电机的选型与仿真计算王志成
工学博士,副研究员,国科大硕士生导师。长期从事高性能伺服系统、现场总线等的研究与开发工作、嵌入式系统方向软硬件教学工作。
曾参与或主持国家工信部“高档数控机床与基础制造装备”国家科技重大专项“总线式全数字高档数控装置”、“开放式数控系统支撑技术创新平台建设” 以及“基于二次开发平台的专用数控系统开发与应用”、辽宁省企业技术中心专项资金项目“‘蓝天’高性能伺服驱动器的研制”、辽宁省自然科学基金项目“高性能可重构伺服驱动单元平台开发”等多项国家、省市科研课题。
作为伺服部负责人,主持研制出了第三代高性能现场总线(SSBIII)和高性能伺服驱动器(GJSXXX系列)两类关键产品。SSBIII由高档数控国家工程研究中心命名,具有完全的自主知识产权,已成功应用到国家科技重大专项和GJ400、GJ301等总线式数控系统产品中。SSBIII性能优异,达到了与国外同类产品性能相当的水平。伺服方面所研制的LT-GJS015ADZ总线式伺服驱动单元获2012年辽宁省优秀新产品一等奖。所开发系列化高性能伺服驱器产品,已批量销售,成为公司发展重要的增长点。
基于在高性能伺服系统、数控系统及现场总线技术攻关及创新工作,先后申请了国家发明专利9项,软件著作权2项,在《机械工程学报》、《中国机械工程》等重点刊物及学术会议上发表论文20余篇。课程时长 · 15学时 进入学习
-
面授十一、机器人机械设计的关键技术
本课程对机器人机械设计中的关键技术进行讲解。主要内容涉及:
——与动力学模型相关的参数设计与实践
——基于ansys有限元分析的结构设计技术与实践
——机器人关节设计要点等魏明哲
浙江大学机械工程硕士。新时达多款机器人的机械设计负责人。
-
早鸟票
3月13日前
2100元
2人同行价 1900元
3人及以上同行价 1700元
-
中鸟票
4月28日前
2300元
2人同行价 2100元
3人及以上同行价 1900元
-
晚鸟票
4月13日前
2500元
2人同行价 2300元
3人及以上同行价 2100元
-
复杂运动控制系统开发高级研修课程
注:面授课程从即日起开始接受预报名,报名人数超过25人后,通知开班日期(一般为从通知日起两周后,我们会给学员流出足够的时间安排行程)。
报名电话:18817519331
-

微信公众号
人工智能与机器人干货文章