返回首页
增强型物理交互式机器人躯体设计与应用
从场地(腿足)机器人和医疗、假肢机器人出发,介绍面向物理交互性能的机器人躯体设计与应用
线下主题沙龙

时间 · 5月5日 地点 · 浦东新区环科路999弄5号楼2楼智音厅 主办 · 睿慕课 上海机器人产业技术研究院 协办 · 浦东国际人才港 浦东国际人才发展中心 阿里巴巴创新中心
从场地(腿足)机器人和医疗、假肢机器人出发,介绍面向物理交互性能的机器人躯体设计与应用
线下主题沙龙
时间 · 5月5日 地点 · 浦东新区环科路999弄5号楼2楼智音厅 主办 · 睿慕课 上海机器人产业技术研究院 协办 · 浦东国际人才港 浦东国际人才发展中心 阿里巴巴创新中心
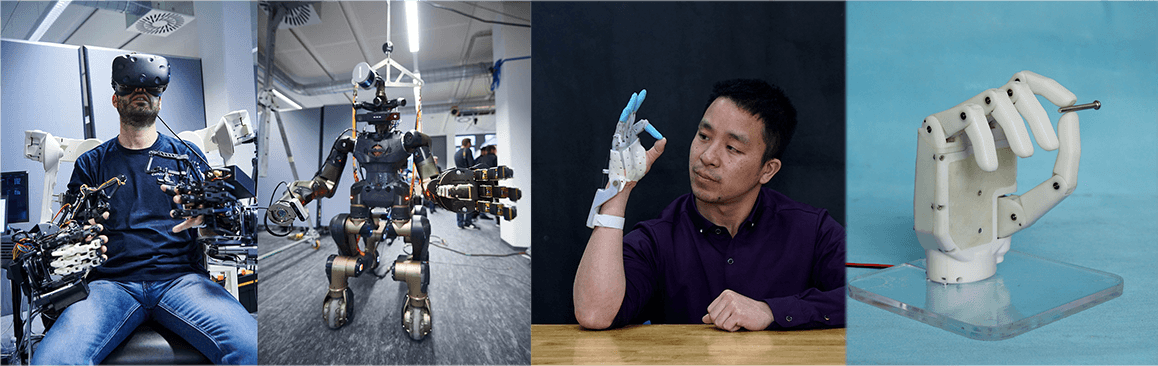
未来的机器人应用将更加聚焦于与外界物理世界交互的场景,诸如复杂多变的工业生产、灾后救援、家庭服务与医疗康复等,这就要求机器人的躯体设计具备增强的物理交互性能。任赜宇博士携手刘欢博士,从场地(腿足)机器人和医疗、假肢机器人出发,分享面向物理交互性能的机器人躯体设计与应用。
上午
面向场地(腿足)机器人的增强型物理交互躯体的设计与应用
 任赜宇
任赜宇
意大利技术研究院(IIT)博士后,意大利技术研究院和热那亚大学博士,博士期间参与欧盟CENTAURO (H2020-ICT-23-2014)与WALK-MAN (FP7-ICT-2013-10)项目。现研究方向为增强型物理交互性能的机器人躯体设计与应用,具体聚焦于SEA腿足式机器人关节驱动器、面向场地机器人的欠驱动机械手、基于SEA和主动PEA的弹跳储能单腿等。相关成果被IEEE ICRA, IROS与RAL收录。
课程大纲
场地(腿足)机器人的增强型物理交互躯体
a)重要性与发展趋势
b)物理交互性能的具体要点
i.高运动能量效率 (High Motion Energy Efficiency)
ii.高运动爆发力 (High Strength)
iii.高物理坚固性 (High Physical Sturdiness)
iv.人机交互安全性 & 可靠性 & etc.
c)具体关注的机器人物理交互躯体
i.机器人单腿 (eLeg @ 2018 ICRA & Humanoids)
ii.欠驱动机械手 (HERI & HERI II Hand @ 2017 & 2018 IROS)
iii.关节驱动器(iit的模块化串联弹性驱动器SEA @TreeRobotics)
高运动能量效率
a)非对称的柔性驱动概念介绍(Asymmetrical Compliant Actuation)
b)3自由度的能量效率弹跳单腿的设计介绍(eLeg)
c)相关实验验证和结果分析
高运动爆发力
a)机械手的强有力抓取
i.机械手设计整体回顾
ii.从HERI Hand到HERI II Hand的设计
1.欠驱动的应用
2.模块化手指的应用
3.版本迭代心得
iii.相关实验验证和结果分析
b)全尺寸人形单腿的高爆发力弹跳运动
i.关节主驱动器选型(SEA)
ii.关节二级副驱动器(PEA)设计
iii.相关实验验证和结果分析
高物理坚固性
a)各类柔性结构在机械手和关节驱动器的应用
b)相关实验验证和结果分析
i.欠驱动机械手(HERI II Hand)在实际项目中的表现(EU CENTAURO Project)
腿足式机器人关节驱动发展分析
a)电机 & 液压驱动方案
i.电机驱动:
1.传统工业机械臂方案 & 串联弹性驱动器 & 本体电机
2.相关并联弹性驱动器(PEA),变刚度驱动器(VSA)以及串联离合器驱动器的介绍(SCA)
ii.液压驱动:
1.集成模块化的液压驱动单元ISA(MOOG & IIT 联合研发)介绍
b)各驱动方案应用场景与发展趋势总结
下午
面向医疗(假肢与手术机器人)的欠驱动机械手设计与应用
 刘欢
刘欢
意大利那不勒斯大学博士后,上海交通大学获博士,博士期间参与国家973计划“人体运动功能重建的生机电一体化科学基础”项目,主要研究仿人形假肢手的运动协同原理,以及运动协同的机构实现。现研究方向主要为医疗机器人的机电一体化设计和应用,包括欠驱动灵巧假肢手、用于机器人手术的微型机械手、穿刺活检机器人等。相关成果发表在IEEE TRO,TNSRE,ICRA等。
课程大纲
基于连续体传动机构的仿人形假肢手
a)仿人形假肢手的背景介绍
i.仿人形机械手(灵巧手与假肢手)的发展与趋势
ii.仿人形机械手的欠驱动原理和机构实现
b)连续体传动机构
i.耦合连续体机构
ii.连续体差分机构
c)基于耦合连续体机构的机械手
i.线性主运动与连续体机构的对应关系
ii.二自由度假肢手模型的设计
iii.实验与讨论
d)基于连续体差分机构的半掌假肢手
i.研究背景与设计目标
ii.差分机构/传动链的设计
iii.实验与讨论
e)基于连续体差分机构的全掌假肢手
i.研究背景与设计目标
ii.差分机构/自锁机构/力放大机构的设计
iii.实验与讨论
f)小结
用于机器人微创手术的微型机械手
a)机器人手术现状与发展趋势
b)MUSHA微型机械手的设计
i.蛇形欠驱动手指的设计
ii.指尖三轴力传感器的设计
iii.基于ROS的控制系统
c)实验与总结
聚焦前沿技术与应用,紧跟国际学术发展潮流
不是纯高深的理论讲座,讲师采用直观易懂的表达方式,并结合大量实际机器人演示案例进行讲解,轻松传达前沿知识。
适合人群和背景要求
适合机器人行业硬件设计人员、机器人学科科研人员及相关行业从业者,
需具备机械、电子、机械电子、机器人学科背景