1. 电流环式
直接根据电力环(力矩)反馈和机器人系统动力学方程,估计出外力矩。这种方式最困难的就是关节摩擦力估计,该摩擦力受到机器人位姿,转速,温度,油脂状况等很多因素影响,难以准确建模和辨识。减速器越大,摩擦力误差也越大(有兴趣的可以翻翻HD减速器的手册,有摩擦力相关的详细介绍)。因此这种方式检测碰撞力矩精度有限,但成本低,目前主要应用在小机器人上,比如YUMi机器人,单臂负载约0.5kg。

2. 柔性关节式
根据关节力矩传感器和双编码器的反馈估计外力矩。这种方式避免了摩擦力建模和估计,碰撞检测精度很高(大家还记得ICRA会议时的空手挡刀吗),但成本过高。典型的一款机器人时Kuka的iiwa机械臂。

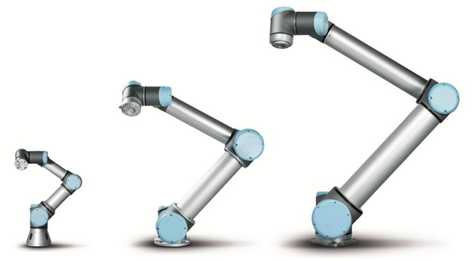
3. 双编码器式
与上一种方式相比,少了一个关节力矩传感器。谐波减速器的刚度较低,这里其实是将谐波减速器当做一个关节力矩传感器使用,使用与柔性关节同样的算法也可以估计外力。但谐波减速器的刚度比力矩传感器还是要高很多,外力检测精度较低,但原理上也可以避免摩擦力的影响。标定谐波减速器的刚度比较困难,HD的减速器手册会给出该值,但国产绿的减速器没有给出该值。这种方式典型的产品就是UR机械臂。
4. 电子皮肤式
根据机械臂表面的压力传感器检测外力。这种方式检测灵敏,精度很高,但成本过高,装配复杂。今年工博会博世展示了基于电子皮肤的APAS人机协作智能系统。

5. 底座力矩传感器式
根据机器人底座的力矩传感器检测外力。今年工博会有幸体验了下Fanuc的绿色协作机器人,发现它的碰撞检测非常灵敏,即使在下图这方方向上施加力(力臂很小),机器人也能迅速检测出并停止运动。之后看到有资料说这类机器人是安装在一个大力矩传感器上,这才恍然大悟。
本文转载自知乎,作者:桂凯,如若转载请联系原作者。