
由于实践中视觉的需求千差万别,所以 vSLAM 对于相机和镜头选型等往往都不同,预装的视觉硬件一旦不能满足需求,反而会成为累赘。本次公开课重点分析几种开源的 vSLAM 运行效果、特点,可帮助SLAM学习者快速进行 vSLAM 选型,减少时间和机会成本,关注最新视觉 SLAM (例如Vins-Fusion)研究动态。
- 第1章 眼睛的进化
- 1-1 眼睛的进化 ( 05:29)
- 第2章 单目、双目和深度相机
- 2-1 单目、双目相机 ( 05:30)
- 2-2 深度相机 ( 17:29)
- 第3章 几种开源vSLAM分析
- 3-1 ORB_SLAM ( 07:49)
- 3-2 VI_ORB 、VINS ( 08:54)
- 3-3 OKVIS ( 04:00)
- 3-4 maplab ( 05:03)
- 3-5 VINS-Fusion、MSCKM ( 08:17)
- 第4章 vSLAM相机选型
- 4-1 单目、双目对比选型 ( 11:01)
- 第5章 vSLAM算法的研究与实现
- 5-1 vSLAM的应用 ( 07:44)

周平
技术专家
- 讲师简介
- 小觅智能 SLAM 技术总监,主要负责公司机器人视觉 SLAM 技术的研发和应用,对机器视觉、人工智能等技术有深入研究。曾在百度贴吧,书旗小说等亿级流量产品平台担任高级研发工程师、资深产品架构师和技术总监,编程经验10年+,具备丰富的技术落地和实战经验。
- 课程目标
- 充分了解各大开源项目特点,运行效果和 SLAM 相机选型技巧。
资料下载
-
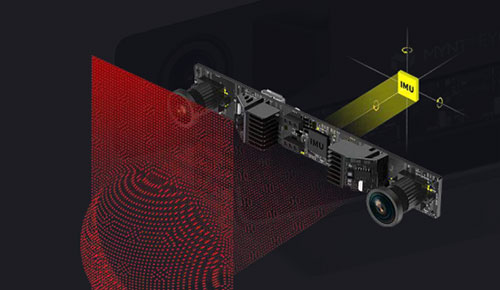
 双目结构光深度惯导相机对于创新的启发和探索10.2M 439次下载
双目结构光深度惯导相机对于创新的启发和探索10.2M 439次下载