

基于EtherMAC实时以太网的开放式运动控制平台
简介:
EtherMAC是一种基于标准硬件的实时以太网通讯协议。该网络协议通过采用最后一个从节点管理网络通信的方式实现了网络通信周期的精确控制,使主节点不需要专用的硬件或硬实时操作系统的支持,即可完成严格实时控制。通过分布时钟实时补偿机制,EtherMAC网络中的节点可以实现纳秒级的精确同步。因此在基于EtherMAC的运动控制平台中,主控制器可采用具有标准以太网接口的工控机或触摸屏,从而实现运动控制平台的网络化、开放化和软件化。
系统架构:
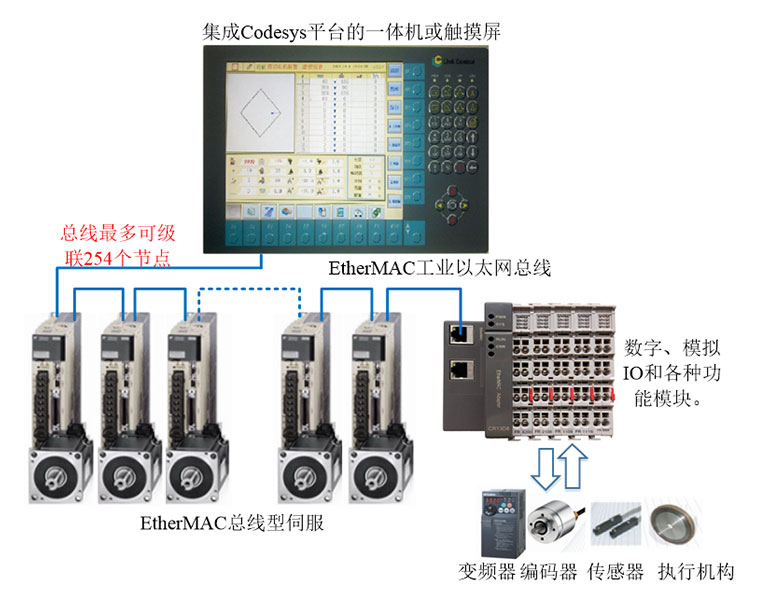
主节点:基于标准工控机或触摸屏,不需要专有硬件和实时操作系统。应用开发主要基于Windows CE、Windows XP/7/8/10和Linux
从节点:带有EtherMAC接口的现场设备。针对特定应用开发了支持EtherMAC的从节点模块,其中包括:
网关模块:标准的主节点设备可以通过网关与松下RTEX、安川MII和MIII总线型伺服相连。 总线型伺服:我公司与伺服生产厂家合作开发了支持EtherMAC的总线型伺服驱动器。 伺服接口卡:通过线缆可以与具有标准接口和非标准接口的伺服驱动器相连。 O模块:支持数字量IO、模拟量IO、增量式/绝对值编码器、温度模块等功能模块。
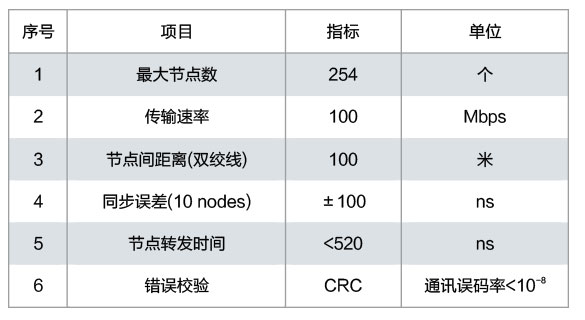
性能指标:
EtherMAC的具体性能指标如表所示:
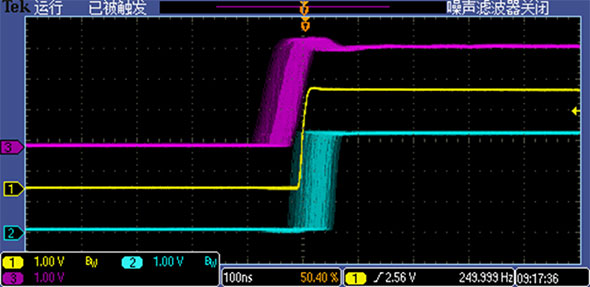
EtherMAC的10从节点网络中,任意从节点的同步精度如图所示:
知识产权情况:
EtherMAC实时工业以太网技术是由山东大学和山东易码智能科技协作开发完成的,现已有7项发明专利获得授权。该项技术还被列入国家工信部2011年第三批行业标准制修订计划,标准名称:《工业机械电气设备及系统用的EtherMAC系统结构与通讯规范》,现已完成标准制定。
产品体系:
EtherMAC是工业自动化系统的核心总线化技术;使用该技术,可以低成本地、灵活地配置出标准化、模块化、软件化的控制系统。
EtherMAC技术的产品体系有三个层次:
1、为设备制造商提供集成专家工艺知识的个性化控制系统解决方案。
2、为系统集成商提供开放式、模块化、总线化的PAC(可编程自动化控制器)应用开发平台(总线化功能模块+自动化软件平台)。
3、为控制系统开发商提供EtherMAC总线协议栈IP,开发自己的控制系统的各种功能模块及伺服驱动器。
软件平台介绍
EtherMAC在协议驱动中提供实现不同实时性能的协议调用接口函数,满足分散式控制系统和集中式控制系统的对主节点实时性的要求。为满足不同层次开发者的需求,分别提出了基于通用软件开发平台和基于第三方集成开发环境的运动控制系统开发模式
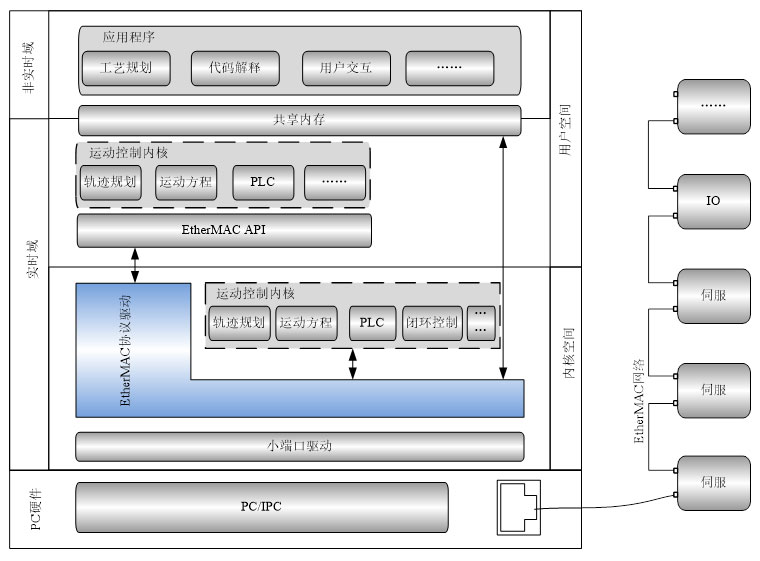
基于通用软件的开发平台:
支持操作系统:Windows CE6/7
支持硬件:X86,Cortex-A8
EtherMAC的主节点应用程序可以实现在通用软件平台上开发,系统结构如图5所示。
设备开发商可以使用共享内存的方式与EtherMAC运动控制内核交互,从而实现轨迹规划、插补及PLC的控制。
对于实时需求更为严格的控制系统,EtherMAC可以提供底层协议接口,设备制造商可以通过调用EtherMAC协议驱动函数,将自己的控制算法封装成库,提供给上层应用程序开发人员使用。
基于通用软件的开发方式
基于CodeSys的开发平台:

基于CoDeSys的PAC系统开发平台结构
支持的操作系统有Windows CE6/7, Linux
支持的主控硬件平台:X86、Cortex-A8
基于德国Smart Software Solutions(3S)
公司的CoDeSys开发系统定制了EtherMAC通信功能块,实现了基于EtherMAC的可编程自动化控制(Programmable Automation Control, PAC)系统开发平台,平台结构如图6所示。该平台提供了完整的PLC开发环境,支持使用IEC61131-3规定的CFC(连续功能图)、SFC(顺序功能图)、LD(梯形图)、FBD(功能块)、ST(结构化文本)、IL(指令表)六种PLC编程语言进行控制系统开发,同时该平台集成了电子凸轮和各种结构的机器人运动控制库,提高了用户的编程效率。
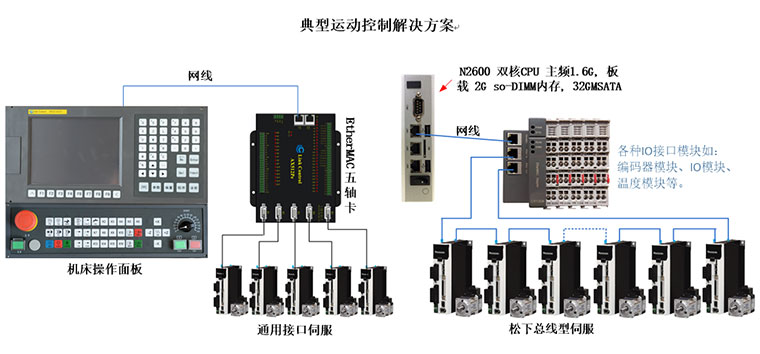
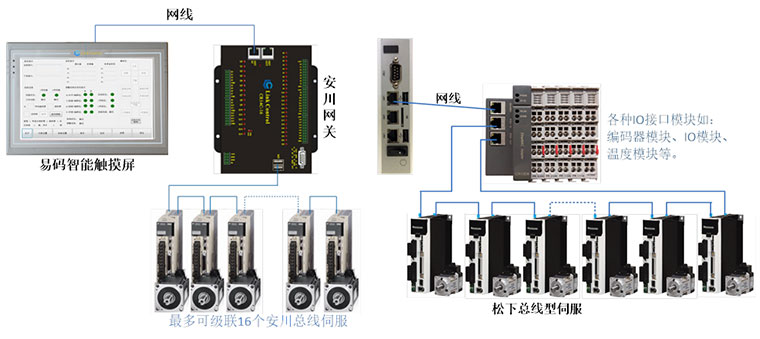
系统配置典型方案
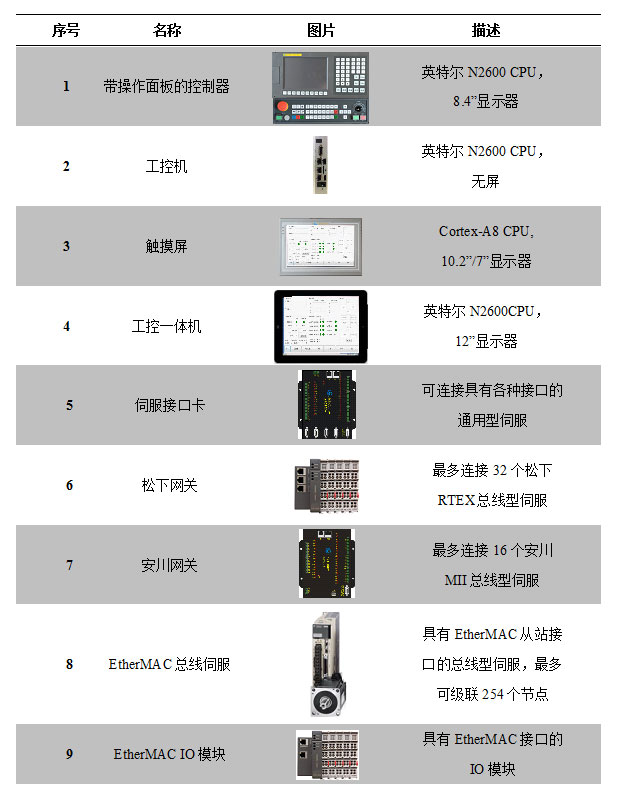
针对不同的应用场合,开发了不同的主站和从站节点。其中主站有机床操作面板、工控机、触摸屏和工控一体机,从站有伺服接口卡、松下网关、安川网关和总线型伺服。主站和从站之间互相搭配,可以为用户提供高、中、低档不同性能的解决方案。
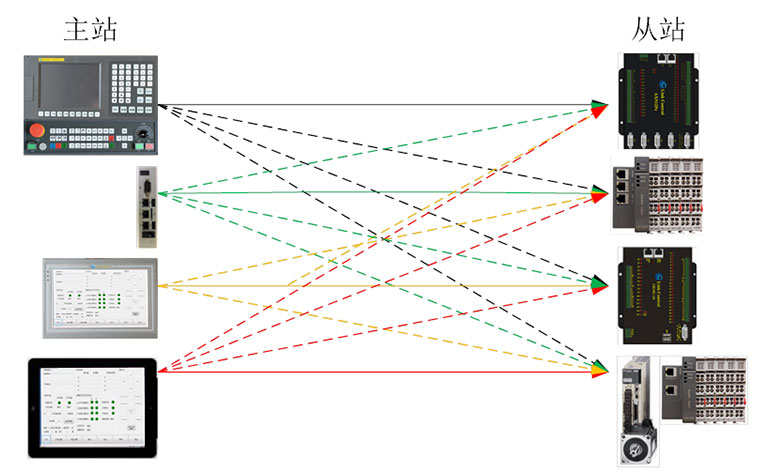
EtherMAC主站和从站的映射关系

在实时以太网总线平台EtherMAC下,我公司针对不同的应用需求,为客户提供了若干种配置的解决方案。对于逻辑关系相对简单、运算量小的系统,主节点可以选择触摸屏;对于运算量较大的系统,主节点可以选择工控机。从节点可以根据不同的应用需求选择伺服接口卡或者总线型伺服。
系统配置典型方案
简介:
支持操作系统:Windows XP/7/8/10 及embeded版本+德国Kithara实时扩展
支持硬件:X86全系列CPU
在高端自动化和机器人控制领域,通常需要运动控制与机器视觉的集成,目前机器视觉常采用智能相机或独立PC+视觉算法解决,并通过通讯方式与运动控制器交换数据完成相应的运动控制。而本平台基于PC+Kithara实时拓展软件,提供了紧凑型一体化的运动控制+机器视觉的解决方案。
德国Kithara软件公司是业界知名的Windows实时拓展软件专家,自1996年开始致力于Windows实时拓展软件的研发,其推出的模块化Windows实时拓展软件Kithara Realtime Suite(KRTS)支持Windows XP/7/8/10(32&64bit)。为PC的Windows平台提供优秀的实时性能,支持EtherCAT、EtherMAC工业实时以太网主协议站,通过GIGe视觉接口支持OpenCV和Halcon视觉库。目前国内外很多大公司都采用其产品,如博世、西门子、阿尔斯通等公司都是其重要客户。
在实时模式下同时运行图像采集与处理,其生成结果可直接通知运动控制系统执行相应的动作,极大减少了各种时间延迟,提高了机器视觉的检测效率和性能。
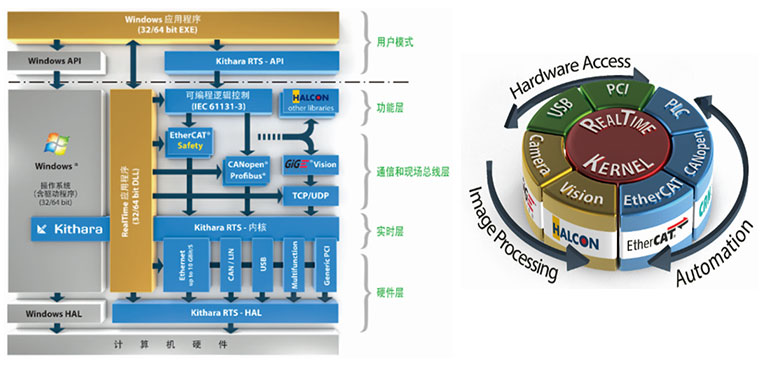
基于Kithara的高端机器人运动与视觉集成方案:
Kithara支持EtherCAT、EtherMAC等主协议栈,最小通讯周期可达到100us。支持GigE和USB接口的相机,通过Halcon或OpenCV视觉库,可在一个PC上实现运动与实时视觉的一体化集成。
方案采用搭载N2600双核CPU的PC,操作系统为WindowsXP/7/8/10+Kithara实时扩展,机器视觉和运动控制全部由一个PC完成。本方案可支持EtherCAT、RTEX、MII/III和EtherMAC总线型伺服,还有丰富的外接模块可供选择。
该方案为用户提供了Windows平台下的机器视觉+运动控制的解决方案,程序开发方便,体系结构简单,使用户加快开发速度的同时节省了硬件成本。
EtherMAC 工业应用
基于EtherMAC的运动控制平台已在机床加工、机器人(SCARA、串联关节、并联和混联结构)、纺织机械、车间自动化、生产线控制、自动化测试、电子封装、建材机械、包装机械等领域获得应用,其开放性、柔性和易用性得到客户的广泛好评。
《喷气织机》

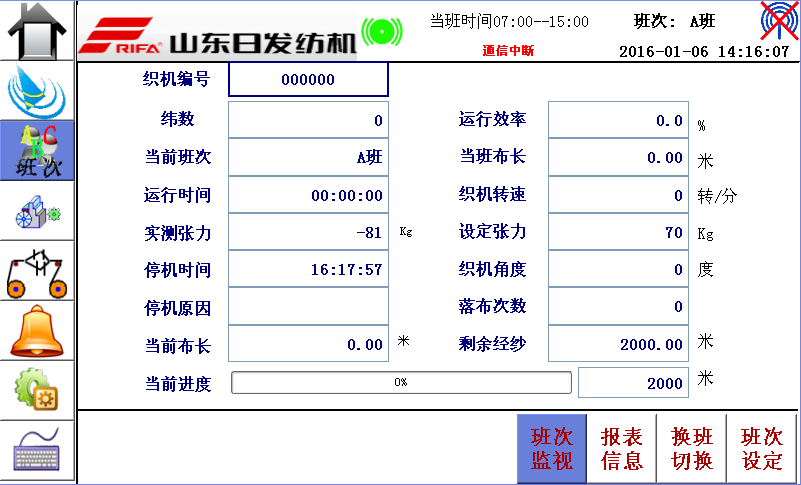
网络化喷气织机控制系统
在山东省数控一代和国家科技支撑计划的支持下,开发了新一代网络化的喷气织机控制系统,系统基于EtherMAC运动控制平台,主节点基于WindowsCE开发,具有以下特点:
1、功能模块化。将喷气织机的电磁阀引纬、电子探纬、电子多臂(选色)、电子送经、电子剪刀、电子折边、提花等控制功能模块化,通过实时以太网总线互联,实现平台化设计。
2、工艺集成化。将工艺知识软件化融合进控制系统中,实现织机的智能化控制与优化,提高织机的运行效率,降低空气消耗量,改善操作性。
3、设备网络化。通过远程监控、生产调度及工艺管理,可提高管理水平,进而提高生产效率。
《自动化锯片磨削单元》
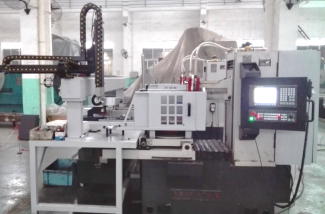
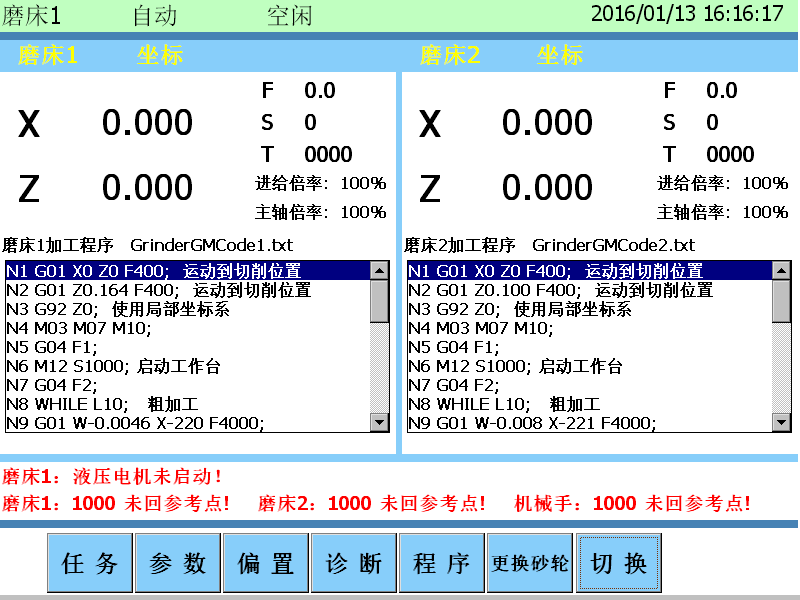
自动化锯片磨削单元
磨削单元采用三通道控制:1套控制系统控制2台磨床和1台桁架机械手。系统上位机采用Window CE系统,底层使用松下RTEX网络式伺服。可以实现了机械手、清洗装置、检测装置、翻转装置、精密磨床一台数控系统中的集中控制。系统柔性高,成本低。并且将锯片加工工艺集成到了数控系统中,实现了参数化编程,操作简单,降低了对操作者素质的要求。此外,还研发了砂轮非线性磨损补偿算法,通过自动测量,实现了加工余量自动计算、砂轮自动补偿和砂轮寿命预警。
《太阳能布片机》


太阳能布片机系统
全自动敷设机是组件自动化生产线上的独立单元设备。其控制系统基于CoDeSys开发,底层采用EtherMAC五轴接口卡。系统可以与自动串焊机以及自动流水线对接,完成电池串在玻璃EVA上的自动敷设。该设备能自动接收上游自动串焊机输出的电池串,然后自动接收流水线的玻璃EVA物料,并将将电池串自动按照正负极精确敷设在玻璃EVA上,最后将敷设完成的组件输出至流水线。生产节拍可以满足自动串焊1800片/小时的产能输出,目前已销往泰国、越南等国家。
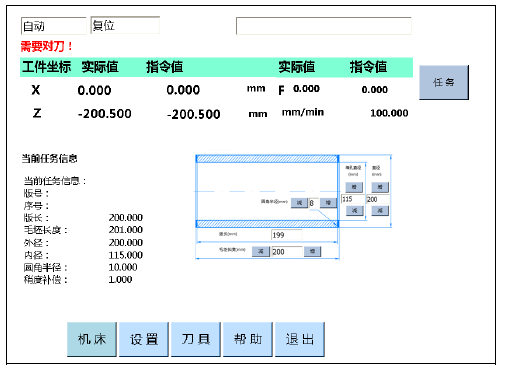
《钢筋弯箍机》
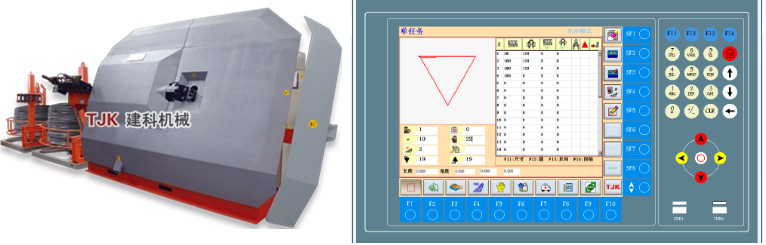
钢筋弯箍机数控系统
该设备为适用于建筑行业的钢筋成形的自动化加工机械,可以实现将钢筋盘条转化为预设形状的箍筋。该控制系统基于Windows CE操作系统开发,通过EtherMAC两轴控制卡实现对两个伺服电机的控制。上图所示为弯箍机操作界面,其中左面为加工图像仿真效果,右面为图形编辑输入表格,用户只需输入箍筋的长度和角度等特征即可再右面显示相应的箍筋成形效果。
《五轴交叉铺网机数控系统》
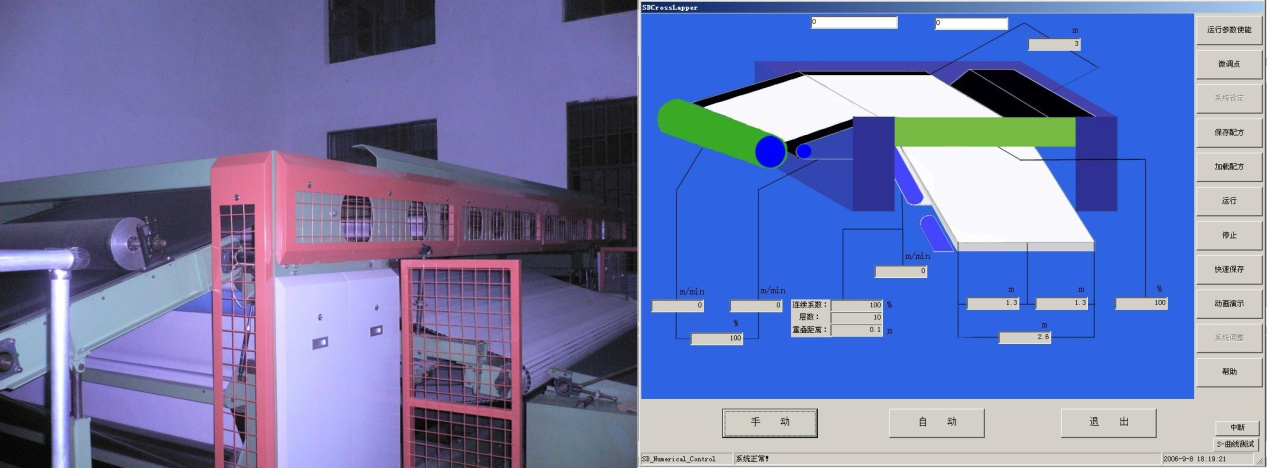
五轴交叉铺网机是无纺布加工中的核心设备。该系统上位机采用Windows CE,底层采用EtherMAC五轴接口卡,可实现对非织造布高速交叉铺网机的五轴联动控制,使用S曲线加减速减轻机械的冲击,铺网速度可达80m/min。产品远销印度、巴西、土耳其、台湾,运行可靠,成功替代进口产品。
《塑钢门窗清角机系统》


塑钢门窗清角机专用系统
塑钢门窗清角机系统上位机基于Windows CE,摒弃传统GM代码,界面友好,动态仿真使得加工过程直观形象,大大降低了对操作工人的要求,同时,易于构筑连接各数控设备的控制网络,实现设备间加工信息共享,目前,该系统已在济南德佳机器有限公司生产的清角机上得到广泛应用。
《21轴9通道型材加工系统》


21轴9通道型材加工系统
系统可控制机床21轴同时进行钻削、铣削、等离子切割组合加工,经实际工程应用表明,系统可大大提高加工效率和加工精度。只需两人便完成搬运和操作,可加工型材最长可达7.5米,平均每工作日可加工型材40根以上,钻孔中心定位误差0.5mm。
《机器人应用》
在EtherMAC运动控制平台的基础上,针对SCARA,Delta,码垛以及多关节机器开发了控制系统。
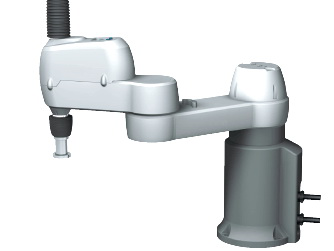
SCARA

Delta

码垛
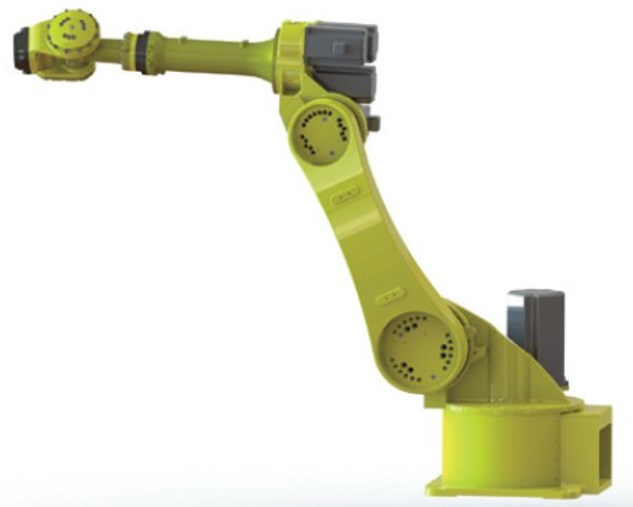
关节型
机器人控制系统
《三轴数控雕铣系统》

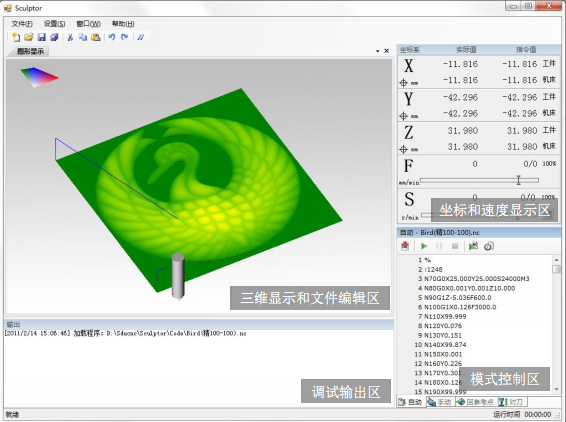
三轴数控雕铣系统
该系统通过修改WindowXP操作系统的NDIS驱动提高系统的实时性能,配合底层控制卡缓冲区实现系统控制功能。该系统具有小线段前瞻和三维实体仿真功能,支持大型加工文件。可广泛应用于木工雕刻、塑料、仿石材料的加工。
《集成MES功能的车磨组合加工专用系统》

网络半精车系统
该系统充分利用高速实时以太网总线与上层网络的一致性,集成MES功能,系统根据工件的条码号即可可直接从ERP/CAPP管理设计单元获取加工任务信息,并自动生成加工代码,操作界面如图 10所示。同时,可将机床当前的运行状况(加工节拍,机床使用情况,当前机床状态)等传至上游管理单元进行分析处理。

研究学者
- 讲师简介
- 1981年1月毕业于山东矿业学院(今山东科技大学)机电系,1988年7月和1995年7月分别获山东工业大学机械制造及其自动化专业硕士和博士。2003年和2006年分别被破格晋升为副教授和教授,2000年被评为博士生导师,现为山东大学二级教授,山东大学机械学院创新实验室主任、山东大学数控技术研究中心主任。1993年―1994年获英国文化委员会TC奖学金在英国Lancaster 大学进行合作研究。2001年作为高访在美国加洲大学戴维斯分校合作研究半年。为中国机械工程学会高级会员,中国生产工程分会机床专业委员会委员,全国高校制造技术及机床研究会理事及华东分会副理事长,国家自然科学基金“同行专家”评议人、系统仿真学报审稿专家。






