
师云雷
工程师 微创医疗
微创医疗工程师,天津大学机械工程学院硕士,研究方向:医疗机器人。研究具体内容:主从双边控制、力传感、力反馈、柔顺控制、关节控制器。擅长领域:手术机器人产品研发、机器人控制器设计、控制器算法、机器人系统调试与故障诊断等。
-
0
课程 -
3
文章
TA的文章

(上篇)第18章 机器人辅助手术中的力反馈和感觉替代
13057浏览
2018-03-12
本文主要从力反馈方法,环境端信息测量和估计方式,遥操作类型,遥操作控制性能评估以及设计的影响几个方面进行了综述,并提到和解释基本上遥操作理论的核心。
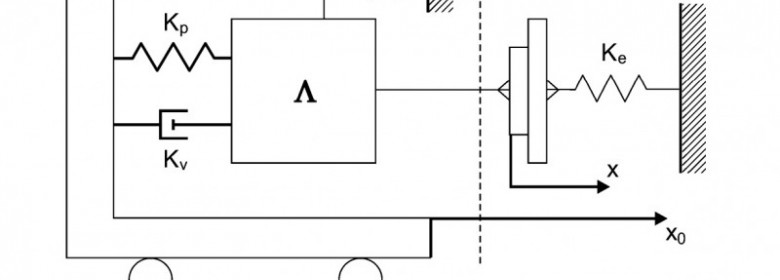
浅谈阻抗
2970浏览
2017-12-14
阻抗控制是工业界设备(包括机器人)的关注的一个重要指标,作者从专业角度理解,阻抗控制背后的思路调整系统的表征惯量、阻尼、和刚度,并分别举例详加说明。
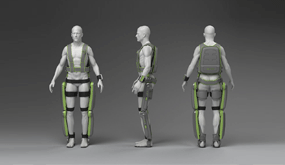
外骨骼机器人入门学习小结
6205浏览
2017-12-18
本文主要介绍外骨骼机器人、外骨骼机器人控制方法,重点讲解几款外骨骼机器人典型的技术方案,并总结外骨骼机器人的现状和技术/商业难点,而且作者还分享了顶尖外骨骼公司网站的链接和丰富的视频链接等你来看哈

