运动仿生
神经信息仿生:
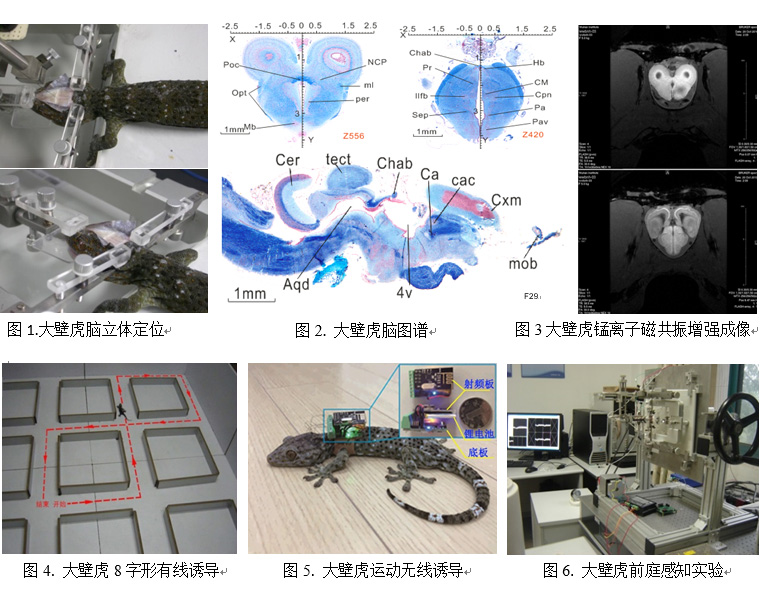
在大壁虎动物机器人研究方面,建立了大壁虎脑立体定位系统,开展了大壁虎脑图谱的构建,以及基于大壁虎中脑运动相关核团调控的人工运动诱导探索,初步实现了大壁虎左右转向及前行等基本运动的人工调控。
鸽子飞行仿生:
1、鸽子飞行的神经调控
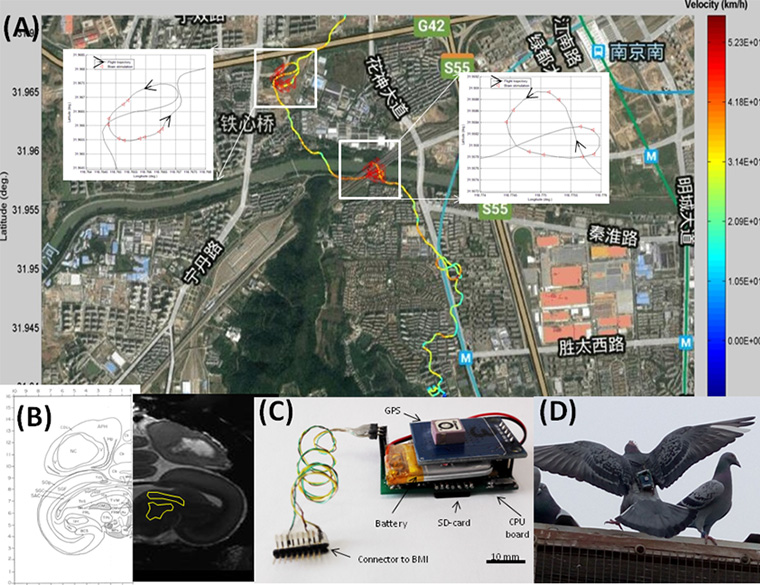
从鸽脑运动控制的底层(中脑运动神经网路)入手,使调控信息直接下行至脊髓,减少中间环节和其他信息源的干扰,提高飞行调控的可靠性和稳定性,首次实现鸽子户外飞行的人工诱导。
2、鸽子地磁导航行为模式及鸽子的磁调控探索
借助鸽子机器人平台,分析载荷数据与地磁图信息差异,研究鸽子的地磁导航行为模式。研究初步显示地磁总强度梯度对飞行轨迹有明显影响,这为鸽子机器人的磁调控提供依据。
3、仿鸽子扑翼飞行器的设计与制作
利用鸽子机器人平台,获取户外飞行的运动学和动力学数据,结合翅羽及尾巴的结构和气动特点,设计新型仿生飞行机构。
鸽子飞行的神经调控
(A)鸽子户外飞行定点盘旋的人工诱导,白色矩形的局部放大图显示了神经刺激时刻(红色三角形)和诱导出的盘旋轨迹;
(B)鸽子中脑的神经刺激靶点,黄色标注的上下区域分别代表丘间核和中脑网状结构内侧;
(C)在体神经调控模块,体积34×24×20mm,重量16.8g;
(D)背负神经调控芯片的鸽子。
仿壁虎机器人:
一、仿壁虎机器人90°爬壁运动协调控制
建立多自由度刚体模型,基于SimMechanics和ADAMS开展动力学仿真;测定了干粘附材料的粘附性能,获得合适的黏附-脱附轨迹,黏附切向和法向粘附力特征曲线,指导仿壁虎机器人粘附脚掌设计,首次实现了在玻璃光滑墙面上仿壁虎机器人90°爬壁实验(图a)。针对粗糙表面,设计了仿生钩爪式仿壁虎机器人,实现了建筑粗糙外墙面的90°爬壁(图b)。
二、仿壁虎机器人负表面(180°)粘附运动机理
用大壁虎在负表面运动步态和接触力学的研究结果,规划仿壁虎机器人负表面的仿生步态,建立负表面四足粘附机器人的运动稳定性判据,进行动力学仿真与负表面粘附爬行实验,结合研制的三维力传感器获取足端接触粘附变化曲线,提高仿壁虎机器人在负表面的运动稳定性。
三、微重力下仿壁虎机器人调姿-着陆策略及仿生
大壁虎在自由落体时,可通过尾巴与四肢协调运动,实现自身姿态的调整,同时能够缓冲着陆并粘附于目标面。空间仿壁虎机器人基于该仿生机理,进行了仿生尾巴和主动粘/脱附脚掌设计,通过悬挂方式模拟微重力环境,空间仿壁虎机器人通过调控尾巴转速控制与目标面姿态差,采用力反馈控制和主动粘/脱附脚掌,实现了与目标面的缓冲碰撞与稳定粘附,为空间新型在轨服务机器人提供关键技术支持。
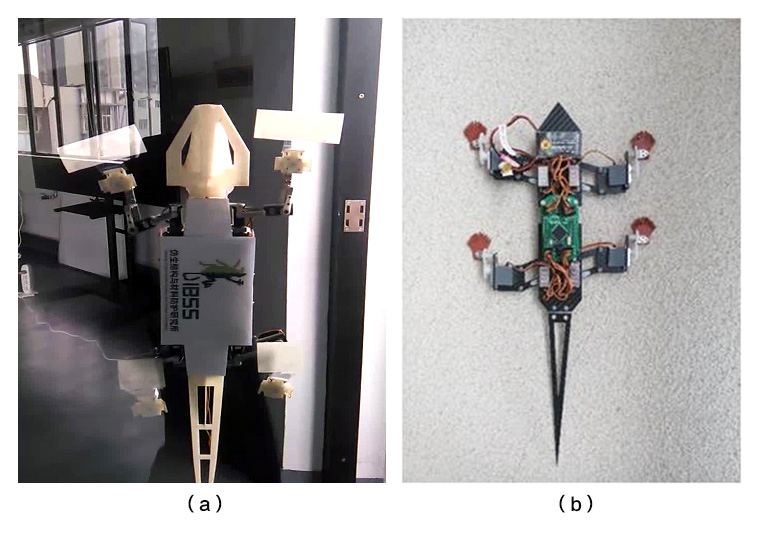
图(a):干粘附材料仿壁虎机器人90°爬壁;
图(b):钩爪式爬壁机器人建筑外墙面的90°爬壁。
仿生功能材料
轻质结构材料:
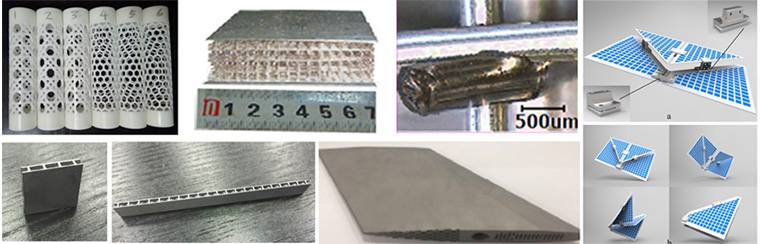
课题组通过3D打印等技术加工的典型轻质结构材料
以航空航天对轻质结构材料的要求为目标,采取层级设计和多功能协同优化方法,辅助以多手段加工技术,为轻质结构材料的设计和制备提供了良好的平台。该研究方向承担若干国家级科研项目,发表国内外优秀期刊数十篇。
仿生黏附材料:
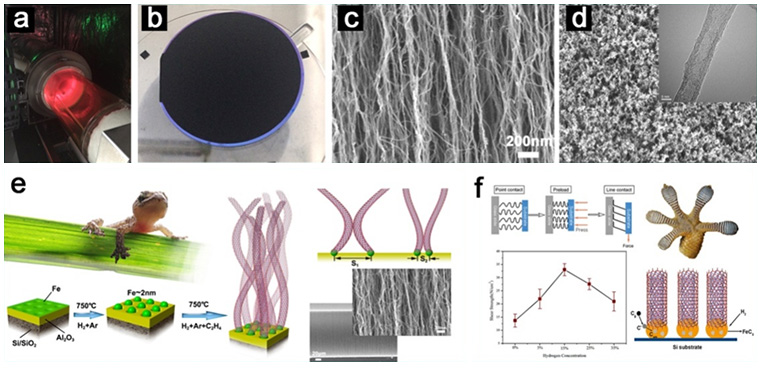
Nano-Tytan 160管式炉系统(图1a),可实现参数可控的纳米碳材料制备。如图1b~d所示,制备的黏附材料从形貌和结构上与生物体壁虎的脚掌刚毛有异曲同工之处。制备的碳纳米管阵列切向黏附强度超过60 N/cm2,是壁虎脚掌的6倍,法向黏附力较小,可实现如壁虎脚掌般的粘附-脱附机制,同时研究了碳纳米管阵列的生长机理(图1e和f),研究黏附材料制备技术为课题的顺利进行提供了黏附材料基础。
泡沫金属:
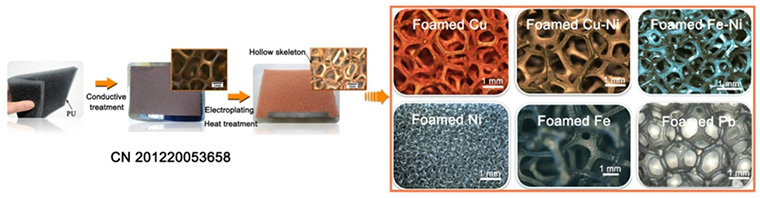
课题组采用以泡沫聚氨酯为前驱体的电化学制备工艺制备出的多种泡沫金属
泡沫金属的功能化应用主要包括:泡沫金属增强的减磨耐磨材料设计、泡沫金属在气体/流体中的热学特性研究(翅片及吸液芯)、泡沫金属及其与碳系纳米材料复合的电磁屏蔽性能研究、泡沫铅电池板栅材料的电化学性能研究、泡沫金属表面润湿性应用研究(超级浮体、油水/气分离、雾气收集器等)五个方面。考察了泡沫金属在每种功能化应用中的理化性能耦合特性和最佳结构参数。

研究学者
- 讲师简介
- 1995.9~2000.3 博士, 南京航空航天大学机电学院;指导老师:王珉教授,现任吉林省省委书记。研究方向:摩擦磨损的热力学理论, 减摩抗磨损表面工程 1983.9~1986.3 硕士, 南京航空航天大学机电学院, 指导老师:潘升材教授,研究方向:摩擦学设计, 1979.9~1983.7 学士, 南京航空学院机械工程系, 学习方向:机电系统设计 工作简历: 现任职务: 教授, 博士生导师。仿生结构与材料防护研究所所长。南京航空航天大学机电学院, 2002年3月~目前。从事仿生结构与仿生材料、摩擦体系热力学及其减摩耐磨表面改性技术研究。曾任职务: 教授, 南京航空航天大学机电学院, 2001年5月始。
- 课程须知
- 无
- 课程目标
- 无